

Новые мягкие роботы могут сами выползать из 3D-принтера сразу после того, как их напечатают



В авангарде современной инженерии и материаловедения происходит тихая, но мощная трансформация, способная коренным образом изменить наше представление о робототехнике и автоматизации производственных процессов. Речь идет о создании машин, чья природа ближе к живым организмам, чем к традиционным механизмам из металла и пластика.
Мягкие роботы
Эти «мягкие» создания открывают невероятные перспективы в самых разных областях — от биомедицинской инженерии до освоения космоса и ликвидации последствий катастроф. Однако до недавнего времени их производство было трудоемким и дорогостоящим, что сдерживало их широкое распространение. Что, если бы технологический прорыв позволил «выращивать» таких роботов практически из ничего, делая их доступными и готовыми к немедленному использованию?
Команда исследователей из Эдинбургского университета представила миру разработку, которая стирает границы между научной фантастикой и реальностью в области аддитивного производства и систем управления. Они разработали новаторский метод трехмерной печати, позволяющий создавать полностью функциональных мягких роботов, которые способны самостоятельно покинуть рабочую зону принтера сразу по завершении процесса изготовления, минуя этап сложной ручной сборки.
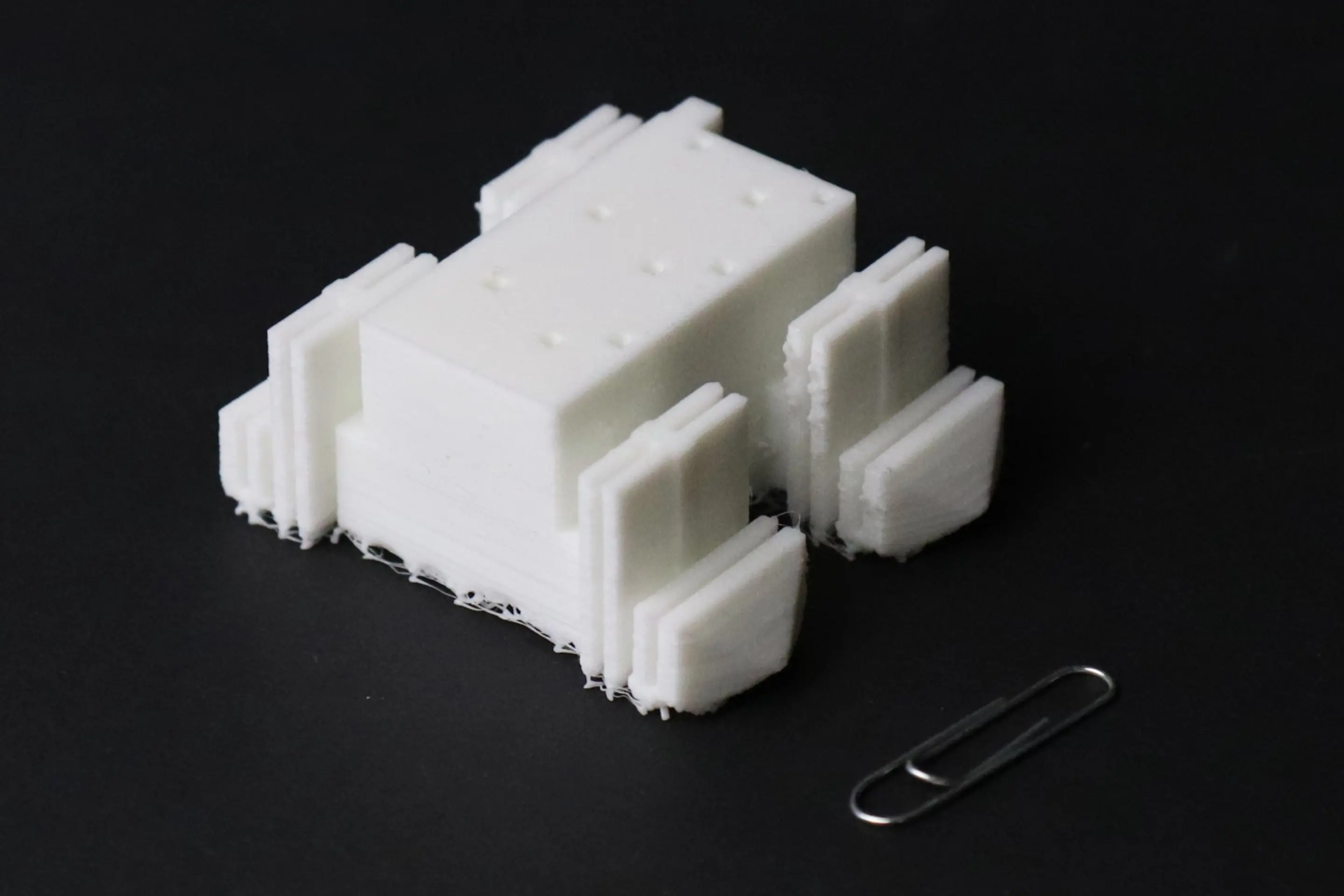
Эти четырехногие пневматические актуаторы размером с ладонь, созданные с применением принципов биомиметики, являются значительным шагом вперед. Они могут помочь в решении сложнейших инженерных задач, включая разработку систем для работы в экстремальных условиях и создание нового поколения медицинских микророботов.
Проект, который ведет аспирант Макс Гепнер, радикально меняет парадигму производства роботов, предлагая остроумную и экономически эффективную систему печати, основанную на доступных компонентах и принципах быстрого прототипирования. Сама концепция мягкой робототехники не нова; ученые десятилетиями исследуют возможности гибких, эластичных материалов, таких как полимеры и эластомеры, для создания машин, способных к деформации.
В отличие от своих жесткокаркасных предшественников, эти податливые устройства могут безопасно взаимодействовать с человеком (Human-Robot Interaction), адаптироваться к неструктурированной среде, поглощать механические удары и проникать в ограниченные пространства. Однако традиционные методы их создания часто включали многоэтапную сборку, прецизионное литье или использование дорогостоящего оборудования, что являлось барьером для масштабирования производства и кастомизации.
Выползти из принтера
Инновационный подход эдинбургской команды из Инженерной школы заключается в уникальной технологии 3D-печати. Она позволяет интегрировать все функциональные элементы робота, включая пневматические каналы для актуации, в единый производственный цикл.
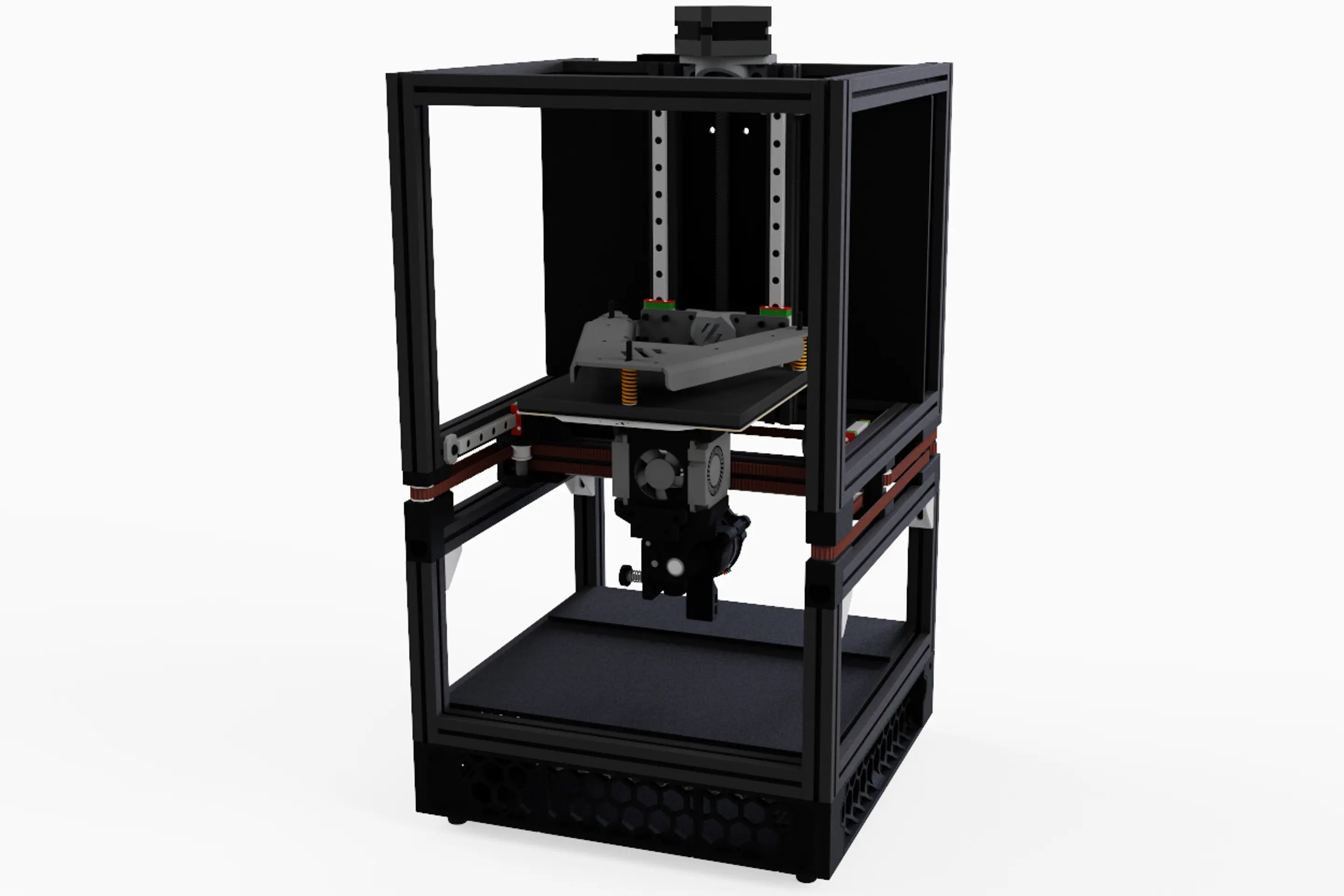
«Мы разработали систему, где робот печатается в инвертированном положении, полностью сформированный, и самостоятельно сходит с принтера по окончании печати», — поясняет Гепнер. Фактически робот оживает, как только к нему подключается источник сжатого воздуха, приводящий в действие его «мышцы» из эластичных полимеров. Этот метод не только упрощает технологический процесс, но и открывает возможности для создания сложных внутренних структур, оптимизированных с помощью методов вычислительной гидродинамики и топологической оптимизации.
В основе технологической платформы лежит так называемый Flex Printer — настольная система, себестоимость которой не превышает $500 за полный комплект. Она собрана из легкодоступных на рынке, стандартных компонентов. «Для сборки и эксплуатации Flex Printer не требуется глубоких специальных знаний в области мехатроники или программирования, — отмечает Джона Мак, соавтор проекта. — Пользователи без предварительного опыта могут начать создавать собственных роботов буквально в течение нескольких дней».
Приверженность команды принципам открытого исходного кода (open-source hardware) благодаря платформе Flex значительно расширяет потенциальный охват технологии, представляя чертежи и программное обеспечение в свободный доступ для стимуляции глобального сотрудничества и дальнейших инноваций в области распределенного производства.
Конструктивно роботы выполнены из мягких полимерных материалов, а двигаются они благодаря системе с сетью внутренних каналов, которые под действием сжатого воздуха расширяются и сокращаются, подобно биологическим мышечным тканям.
Эти «стратегически спроектированные геометрические структуры», как их описывают разработчики, формируются непосредственно в процессе аддитивного производства, позволяя роботам выполнять заранее запрограммированные двигательные паттерны, такие как ходьба или ползание.
«Способность интегрировать сложные флюидные системы непосредственно в тело робота на этапе печати — это настоящий прорыв, — комментирует профессор Адам А. Стоукс, руководитель Института биоинженерии и научный наставник проекта. — Это устраняет необходимость в последующей ручной сборке и интеграции внешних электронных компонентов управления или дорогостоящих актуаторов». Такая простота конструкции радикально снижает производственные издержки и временные затраты, делая реальной перспективу массового, кастомизированного производства мягких роботов.
Где пригодятся мягкие роботы
Уникальные свойства этих машин, такие как адаптивность и безопасность, делают их незаменимыми для работы в сложных и опасных средах. Потенциальные области применения включают поисково-спасательные операции в завалах после землетрясений, где требуется проникновение в узкие и нестабильные пространства; вывод из эксплуатации объектов атомной энергетики, где необходимо минимизировать риск для человека; доставку лекарственных препаратов и проведение малоинвазивных процедур в биомедицине, а также исследование труднодоступных районов на других планетах в рамках космических миссий.
«Мягкие роботы обладают универсальностью, повышенной живучестью и демонстрируют значительные преимущества в широком спектре промышленных и научных приложений», — подчеркивает Гепнер, указывая на их потенциал изменить подходы в здравоохранении, системах безопасности и экологическом мониторинге. Использование недорогих, широко распространенных материалов дополнительно повышает их экономическую привлекательность и способствует устойчивому развитию технологий.
Предложенный эдинбургской группой метод, несмотря на свою технологическую доступность и низкую стоимость, не идет на компромисс с функциональностью. Создаваемые роботы отличаются высокой прочностью, устойчивостью к агрессивным средам и способностью выдерживать значительные деформации, которые были бы фатальны для традиционных жестких конструкций.
«Наша реализация является наиболее экономически эффективной на сегодняшний день», — заявляет Гепнер. Этот успех, основанный на принципах доступности и масштабируемости, открывает дорогу к созданию целых «стай» или «роев» недорогих мягких роботов, способных к коллективному взаимодействию и выполнению сложных задач в рамках концепции распределенного искусственного интеллекта, что ранее было ограничено высокой стоимостью и сложностью производства отдельных автономных единиц. Это также стимулирует исследования в области новых «умных» материалов и систем управления для следующего поколения автономных систем.

